- 1. Belastingen op primaire waterkeringen in Nederland
- 2. Fysica-aspecten van hydraulische belastingen
- Inleiding fysica van de hydraulische belastingen
- 2.1 Modellering fysica hydraulische belastingen
- 2.2 Gebiedsschematisatie
- 2.3 Productieberekeningen voor de fysische relatie tussen basisstochasten en hydraulische belasting parameters in tabelvorm
- 2.4 Bepaling van het representatief verloop in de tijd
- 2.5 Transformatie hydraulische belastingen naar de teen
- 2.6 Rekenwaarden voor hydraulische belastingparameters
- 3. Statistiek
- 4. Probabilistiek
Modelonzekerheden in lokale belastingen
Naast inherente onzekerheden en statistische onzekerheden spelen modelonzekerheden een belangrijke rol bij de probabilistische modellering binnen het beoordelings- en ontwerpinstrumentarium. In dit artikel wordt de achtergrond van modelonzekerheden van lokale belastingen belicht.
De scope van modelonzekerheden
In de probabilistische modellering wordt voor de meeste watersystemen de statistiek van de lokale belasting op de uitvoerlocaties bepaald vanuit a) de statistiek van de basisstochasten en b) de fysische relatie tussen de basisstochasten en de lokale belasting. Uitzondering hierop vormen de kustgebieden waar de waterstanden door middel van interpolaties zijn verkregen. De lokale belasting wordt weergeven in termen van waterstand al dan niet in combinatie met golfcondities.
De fysische relatie tussen de basisstochasten en de lokale belasting wordt bepaald aan de hand van een groot aantal modelberekeningen. Daarbij worden allerlei aannames gemaakt. Dit veroorzaakt onzekerheid, hier genoemd 'modelonzekerheid in de lokale belastingen'. Modelonzekerheid in de lokale belastingen heeft een bredere betekenis. Onderstaande vier typen onzekerheden vormen samen de modelonzekerheid die doorwerkt in de berekende lokale belastingen:
- Onzekerheid als gevolg van onzekere modelrandvoorwaarden of invoer; dit type onzekerheid ontstaat doordat modelberekeningen uitgevoerd worden met geschematiseerde/vereenvoudigde randvoorwaarden of invoer. De vorm van de afvoergolf in de tijd als bovenrand voor de modelberekeningen voor het rivierengebied is hiervan een voorbeeld.
- Onzekerheid als gevolg van vereenvoudigde modellering van fysische processen, schematisaties en kalibratie. Deze onzekerheid ontstaat doordat verschillende fysische processen niet exact beschreven worden maar slechts bij benadering. Een model is immers slechts een benadering van de werkelijkheid.
- Niet-gemodelleerde aspecten en/of grootheden in de modelberekeningen. Deze onzekerheid ontstaat doordat enkele minder relevante aspecten niet meegenomen worden in de modelberekeningen. Denk aan de sedimentstop van beweegbare keringen of aan het niet bij springtij modelleren of aan laag-frequente golven, die niet worden gemodelleerd.
- Onzekerheid als gevolg van de discretisatie van basisstochasten (lineair interpoleren in tabel). De discretisatie wordt in de praktijk wel zo fijn gekozen dat de verwachte bijdrage aan de onzekerheid klein is; deze bijdrage wordt dan ook in de praktijk verwaarloosd.
De modelonzekerheden kunnen in principe verschillen per locatie en per belastinggebeurtenis. In de huidige rekenmethode voor de overstromingskansbepaling wordt met deze complexiteit pragmatisch omgegaan:
- De invulling van de modelonzekerheid hydraulische belastingen gebeurt voor een belangrijk deel op basis van deskundigenoordeel, in combinatie met gevoeligheidsanalyses en vergelijkingen tussen modelresultaten en meetgegevens.
- Er wordt geen onderscheid gemaakt tussen de belastinggebeurtenissen.
- Locaties worden niet afzonderlijk, maar in groepen beschouwd op basis van fysica en vastgelegd per traject, zodat onzekerheden per deelgebied in een watersysteem kunnen worden toegekend.
- De modelonzekerheden beschouwen de vertaling van basisstochast naar belasting op de uitvoerlocatie in zijn totaliteit, en geven dus geen informatie over onzekerheden in de tussenliggende stappen die deel uitmaken van die vertaling.
De modelonzekerheid hydraulische belastingen wordt in het probabilistisch model beschreven met stochasten. Dit zijn echter geen basisstochasten: ze vormen geen primaire bedreigingsbron en er worden geen productieberekeningen fysica gemaakt voor verschillende waarden van deze stochasten.
In de huidige probabilistische modellering wordt rekening gehouden met modelonzekerheid in de waterstand en de golfparameters hoogte en periode, omdat die drie onzekerheden het belangrijkste worden geacht. Er wordt geen rekening gehouden met modelonzekerheid in de golfrichting en ook niet met modelonzekerheid in het waterstandsverloop in de tijd
Modelonzekerheden in lokale waterstanden
Voor de fysische relatie tussen de basisstochasten en de lokale waterstand wordt gebruik gemaakt van hydrodynamische modellen. In de meeste watersystemen betreft dit WAQUA respectievelijk D-Hydro software.
Bij het bepalen van de modelonzekerheden zijn per watersysteem de belangrijkste bronnen van onzekerheid geïdentificeerd. Bij de rivieren valt daarbij te denken aan onzekerheden in de bodemruwheid en de onzekerheid in de afvoerverdeling bij de splitsingspunten. Uitgebreide analyses zijn uitgevoerd hoe deze onzekerheden doorwerken in de lokale waterstand. Deze analyses worden in detail in [Chbab, 2017] beschreven.
Voor de lokale waterstand geldt dat is aangenomen dat de modelonzekerheid normaal verdeeld is, zie Figuur 1. Met deze verdeling is de kans dat een modelresultaat hoger uitvalt even groot als dat hij lager uitvalt. Modelonzekerheid wordt daarbij uitgedrukt in een gemiddelde μ Rekenkundig gemiddelde van de steekproef, verwachtingswaarde [-] en een standaardafwijking σ Standaardafwijking van de steekproef. Bij een gemiddelde μ Rekenkundig gemiddelde van de steekproef, verwachtingswaarde [-] ongelijk aan 0 is er sprake van een bias in het model. Omdat de productieberekeningen uitgevoerd zijn met gekalibreerde en gevalideerde modellen, waarbij de kalibratie tot doel heeft de bias te minimaliseren, is enkel een standaardafwijking σ Standaardafwijking van de steekproef van toepassing en is het gemiddelde gelijk aan nul (μ Rekenkundig gemiddelde van de steekproef, verwachtingswaarde [-]=0). Dit betekent dat verwacht wordt dat het model gemiddeld genomen het goede resultaat weergeeft. De standaardafwijkingen zijn geschat op basis van gevoeligheidsberekeningen en deskundigenoordelen.
Modelonzekerheid voor de waterstand wordt in rekening gebracht als een correctie op de waterstand. In Riskeer wordt een waterstandscorrectie opgeteld bij de waarde van de lokale waterstand, die berekend is met een waterbewegingsmodel. Om modelonzekerheid weer te geven is deze correctie normaal verdeeld verondersteld met gemiddelde μ Rekenkundig gemiddelde van de steekproef, verwachtingswaarde [-] en standaardafwijking σ Standaardafwijking van de steekproef, zoals geïllustreerd in Figuur 1.
Formule voor berekening van de waterstand met modelonzekerheid.
Deze waterstand is gelijk aan de waterstand uit het waterbewegingsmodel plus een waarde Δh voor de modelonzekerheid van de waterstand. Δh is afkomstig uit de normale verdeling met verwachtingswaarde μ Rekenkundig gemiddelde van de steekproef, verwachtingswaarde [-]=0 en standaardafwijking σ Standaardafwijking van de steekproef.

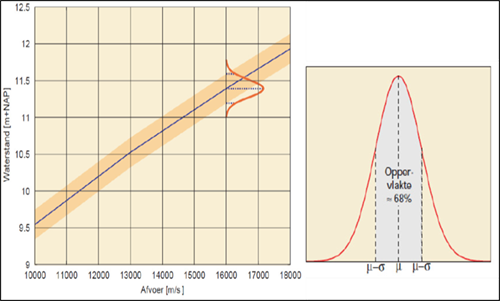
Merk op dat één waarde voor de standaardafwijking wordt gebruikt voor het hele bereik van de basisstochasten, die de waterstand bepalen. Dit houdt feitelijk in dat deze standaardafwijking niet afhangt van de herhalingstijd, zoals geïllustreerd in de Figuur: de hoogte van de oranje onzekerheidsband is constant, oftewel: de onzekerheid in de waterstand is onafhankelijk van de basisstochast afvoer. Bij de vaststelling van de standaardafwijking is wel rekening gehouden met extreme situaties. Voor lage terugkeertijden kan er hierdoor sprake zijn van een overschatting van modelonzekerheid in de lokale waterstand, maar dit bereik is in vooral relevant voor de hydraulische belastingen op de bekleding aan de buitenzijde van de kering.
Samengevat worden in de huidige rekenmethode de volgende waarden voor de modelonzekerheid gehanteerd:
- Het gemiddelde is 0,00 m. (Omdat de modelberekeningen uitgevoerd worden met gekalibreerde en gevalideerde modellen, waarbij de kalibratie als doel heeft een bias te minimaliseren, is de keuze gemaakt om voor de modelonzekerheid in lokale waterstand de bias gelijk aan nul te stellen.)
- De standaardafwijking is een veelvoud van 0,05 m en varieert - afhankelijk van de beschouwde locatie - tussen 0,15 m en 0,40 m.
In de huidige rekenmethode is de waarde van de modelonzekerheid voor de waterstand alleen afhankelijk van de locatie. In de praktijk wordt hierbij overigens niet naar individuele locaties gekeken, maar naar deelgebieden binnen een watersysteem: alle locaties binnen een deelgebied krijgen dan dezelfde modelonzekerheid voor de waterstand toegekend.
De afgeleide waarden voor de standaardafwijking zijn per cluster van watersystemen in afzonderlijke artikelen weergegeven (samen met de modelonzekerheden in golfcondities):
- Modelonzekerheden Rijntakken en Maas
- Modelonzekerheden Benedenrivieren
- Modelonzekerheden Vecht- en IJsseldelta
- Modelonzekerheden kust
- Modelonzekerheden meren
Modelonzekerheden in golfhoogte en golfperiode
In de fysische relatie tussen de basisstochasten en de lokale golfparameters wordt gebruik gemaakt van golfmodellen (HISWA, SWAN en Bretschneider) met bijbehorende invoer. In het onderstaande wordt ingegaan op de wijze waarop de modelonzekerheden in golfhoogte en golfperiode zijn afgeleid. Op andere golfparameters, zoals golfrichting, wordt geen modelonzekerheid toegepast.
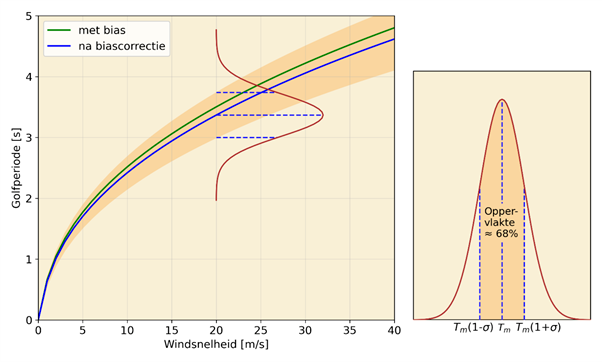
Modelonzekerheden voor de golfparameters golfhoogte en golfperiode worden in rekening gebracht als een correctie van deze golfparameters. Onderzoek leert dat de berekende golfparameters een bias bevatten. Het is een relatieve bias met gemiddelde μ Rekenkundig gemiddelde van de steekproef, verwachtingswaarde [-]. Dit betekent dat de absolute afwijking groter is naarmate de golfparameter groter is. De bias in een golfparameter wordt daarom gecorrigeerd met een vermenigvuldigingsfactor, waarvan het gemiddelde μ Rekenkundig gemiddelde van de steekproef, verwachtingswaarde [-] onderdeel is. Vervolgens wordt de modelonzekerheid in de golfparameter verwerkt. Omdat ook de modelonzekerheid relatief is, gebeurt ook dit met een vermenigvuldigingsfactor. Deze vermenigvuldigingsfactor is normaal verdeeld zonder bias en met standaardafwijking σ Standaardafwijking van de steekproef. Voor de golfparameter met modelonzekerheid is de absolute bandbreedte hiermee groter naarmate de golfparameter groter is. Onderstaande figuur is een illustratie voor de golfperiode voor de correctie van de bias en het meenemen van modelonzekerheid.
De onzekerheid in de golven wordt binnen Hydra-Ring en Hydra-NL als volgt verwerkt op de golfparameters van de golfgroeimodellen:
Formule voor berekening van de waarde van een golfparameter met correctie voor de systematische fout en met modelonzekerheid.
Deze waarde is gelijk aan de golfparameter uit het golfmodel zonder correctie voor de systematische fout en zonder modelonzekerheid maal de correctie voor de systematische fout en maal de parameterwaarde voor de modelonzekerheid. De parameterwaarde voor de modelonzekerheid is afkomstig uit de normale verdeling met verwachtingswaarde 1 en standaardafwijking σ Standaardafwijking van de steekproef.
Het zijn drie overeenkomstige formules, respectievelijk voor de golfhoogte Hm0 Significante golfhoogte [m] en de periodematen Tm-1,0 Spectrale golfperiode [s] en Tp Piekgolfperiode [s].
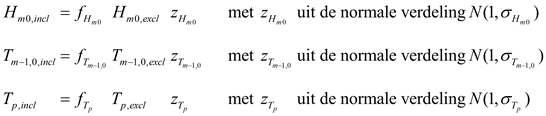
In deze formules duidt het subscript 'excl' op de golfgegevens zonder correctie voor de systematische fout en zonder modelonzekerheid en het subscript 'incl' op golfgegevens met de correctie en met modelonzekerheid.
De vermenigvuldigingsfactor voor de biascorrectie wordt gegeven door:
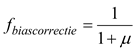
In de WBI2017 databases is deze correctiewaarde incorrect opgenomen als 1+µ. ,zie [Groeneweg, 2018]. zx is een stochast met een normale verdeling met gemiddelde 1 en standaardafwijking σx. De golfparameters met correctie voor de systematische fout en met modelonzekerheid worden gebruikt in de berekeningen met het probabilistische model.
De modelonzekerheidswaarden μ Rekenkundig gemiddelde van de steekproef, verwachtingswaarde [-] en σ Standaardafwijking van de steekproef voor de golfparameters zijn voor alle hoofdsystemen van Nederland overzichtelijk weergegeven in onderstaande tabel (afkomstig uit [Chbab, 2017b]). Deze waarden zijn verkregen door metingen en modeluitkomsten te vergelijken. Een negatieve waarde van het gemiddelde geeft een onderschatting van de werkelijkheid door het gehanteerde model weer. Het modelresultaat moet dan gecorrigeerd worden met een correctiefactor groter dan 1.
| Hoofdsysteem | golfmodel | Hm0 μ |
Hm0 |
Tm-1,0 |
Tm-1,0 |
Tp μ |
Tp σ |
|---|---|---|---|---|---|---|---|
| I. Kust, IJsselmeer | SWAN | -0,01 | 0,19 | -0,04 | 0,11 | - | - |
| II. Brede wateren in rivierengebied/randmeren | SWAN | -0,06 | 0,15 | -0,11 | 0,04 | -0,01 | 0,07 |
| III. Smalle wateren in rivierengebied, Eemvallei | Bretschneider | -0,04 | 0,27 | - | - | 0,03 | 0,13 |
| IV. Markermeer - IJburg | SWAN | -0,05 | 0,11 | 0,04 | 0,08 | -0,04 | 0,05 |
| V. Markermeer - overig (excl. IJburg) | HISWA (wordt SWAN) |
-0,02 | 0,20 | - | - | 0,16 | 0,11 |
Aanvullende opmerkingen
Omdat de beschikbare meetdata om de modelonzekerheid in de golfparameters af te leiden beperkt is, is het niet realistisch om deze locatie-afhankelijk te kwantificeren. Dat betekent dat de afgeleide verdeling voor de modelonzekerheden voor alle locaties gelijk is genomen in een hoofdsysteem. Om dezelfde reden is de modelonzekerheid in de golfcondities niet afhankelijk van de basisstochasten en is dus de verdeling gelijk voor alle terugkeertijden.
Naast de marginale verdelingen van de modelonzekerheid in de golfhoogte en golfperiode, is er in de praktijk ook sprake van een correlatie tussen beide. In principe is deze correlatie afgeleid in [Smale, 2018]. Voor WBI-2017 is echter gekozen om in het probabilistische model de modelonzekerheden in golfhoogte en in golfperiode vooralsnog als onafhankelijk te beschouwen.
Literatuur
Bottema, M. Modelonzekerheden Bretschneider bovenrivieren. Rijkswaterstaat Water, Verkeer en Leefomgeving (RWS WVL), maart 2015.
Chbab, E.H. en J. Groeneweg. Modelonzekerheden belastingen : Wettelijk Beoordelingsinstrumentarium WBI-2017 ; Versie 8. Deltares, rapport 1209433-008-HYE-0007, juni 2017.
Smale, A.J. Correlation between model uncertainties wave height and wave period. Deltares, rapport 11202225-003-GEO-0002, november 2018.
Van Nieuwkoop, J. Kwantificering van de onzekerheden van het gebruik van Bretschneider in het bovenrivierengebied. Deltares, rapport 1209433-007-HYE-0007, maart 2015.
Groeneweg, J. Inconsistentie in modelonzekerheden golfcondities. Deltares, september 2018.