- 1. Mechanismen geotechnische instabiliteit
- 1.1 Introductie
- 1.2 Instabiliteit in binnenwaartse richting
- Beschrijving afschuiven langs diep glijvlak binnenwaarts
- Vervolgmechanismen na binnenwaarts afschuiven langs diep glijvlak
- Kritisch glijvlak en vervolgmechanismen bij afschuiven langs diep glijvlak
- Controle van de binnenwaartse stabiliteit na een binnenwaartse afschuiving
- Afschuiven en/of afdrukken van de bekleding en uitspoelen
- Controle op uitspoelen na een binnenwaartse afschuiving
- Controle van erosie kruin en binnentalud na een binnenwaartse afschuiving
- Afschuiven langs een diep glijvlak bij opdrukken achterland
- Binnenwaarts afschuiven en drainagetechnieken
- 1.3 Afschuiven buitenwaarts en afschuiven voorland
- 2. Veiligheidsanalyse mechanisme afschuiven langs een glijvlak
- 2.1 Technieken voor de veiligheidsanalyse
- 2.2 Model- en veiligheidsfactoren
- Partiële veiligheidsfactoren voor geotechnische stabiliteit
- Materiaalfactor voor afschuiven langs diep glijvlak
- Modelfactor voor afschuiven langs diep glijvlak
- Schadefactor voor afschuiven langs diep glijvlak
- Schadefactor voor een constructief versterkte dijk (langsconstructie)
- Schematiseringfactor voor afschuiven
- Veiligheidsanalyse afschuiven en/of afdrukken van de bekleding en uitspoelen
- Voorbeeld schematiseringfactor voor afschuiven
- Rekenblok schematiseringfactor voor afschuiven diep glijvlak
- 3. Belastingen
- 3.1 Inleiding
- 3.2 Waterspanningen
- 3.2.1 Inleiding waterspanningen
- 3.2.2 Bepalen waterspanningen
- Grondwaterstroming algemeen
- Waterspanningen meten en/of monitoren
- Geohydrologie bij de dijk monitoren
- Bewaken ontwerpuitgangspunten waterspanningen
- Instrumenten om waterspanningen te meten
- Valkuilen bij interpreteren van waterspanningsmetingen
- Voorbeeld van valkuilen bij interpreteren van waterspanningsmetingen
- Schematiseren van de waterspanningen
- Schematiseren waterspanningen stap 1: Beschrijving bodemopbouw, grondwaterstroming en geometrie
- Schematiseren waterspanningen stap 2: Mechanismen en belastingcombinaties
- Schematiseren waterspanningen stap 3: Modelkeuze, schematisering en verificatie
- Onzekerheid waterspanningsschematisering
- Eerste schatting van waterspanningen
- Analytische modellen voor de interpretatie van peilbuiswaarnemingen
- Interpretatie gemeten stijghoogteverloop voor cyclische belasting (Model 3B)
- Niet-stationaire benadering met behulp van de transiënte lekfactor (Model 3C)
- Interpretatie van peilbuiswaarnemingen bij het onderstromen van hoog voorland
- Berekenen waterspanningen
- Theorie achter het berekenen van waterspanningen
- Rekenprogramma's grondwaterstroming
- 3.2.3 Freatisch vlak in de dijk
- Ligging freatisch vlak in de dijk
- Eerste schatting van het freatisch vlak
- Rekenregel voor bepalen van de hoogte freatisch vlak in kleidijk
- Infiltratie naar het freatisch vlak
- Invloed van golfoverslag op het freatisch vlak
- Invloed van neerslag op het freatisch vlak
- Freatisch vlak na snelle val buitenwaterstand: analytische oplossing
- 3.2.4 Stijghoogten in watervoerende laag
- Stijghoogten bepalen in het watervoerend pakket
- Eerste schatting van de stijghoogte in het watervoerend pakket (Model 3A)
- Schematiseren stijghoogteverloop in zandlaag na opdrukken
- Berekenen van de grenspotentiaal
- Modellen van het stijghoogteverloop in een zandlaag onder een ondoorlatende dijk
- Model van stationaire stroming onder dijk met deklaag op watervoerende laag in voor- en achterland (Model 4A)
- Model van stationaire stroming onder dijk gelegen op watervoerende laag (Model 4B)
- Model van stationaire stroming onder dijk met binnendijks de grenspotentiaal (Model 4C)
- Model voor stroming onder dijk, de respons op een sinusvormige hoogwatergolf (Model 4D)
- Model voor stroming onder de dijk, de respons op sinusvormige hoogwatergolven (Model 4E en 4F)
- Berekenen van de opdruklengte bij stationaire stroming (Model 3D)
- Rekenvoorbeeld van de opdruklengte bij stationaire stroming
- Berekenen van de opdruklengte bij niet-stationaire stroming
- Rekenvoorbeeld van de opdruklengte bij niet-stationaire stroming
- Waterspanningen voor buitenwaartse stabiliteit
- 3.3 Overige belastingen
- 4. Karakteriseren van dijklichaam en ondergrond
- 4.1 Externe geometrie
- 4.2 Ondergrond en grondlichaam
- Geologische beschrijving van de ondergrond
- Veen
- Bepalen van grondeigenschappen
- Basisopzet van grondonderzoek
- Strategie opzet grondonderzoek
- Gebruik van beschikbare informatie bij grondonderzoek
- Grondonderzoek van grof naar fijn
- Algemene aanbevelingen bij het gebruik van sonderingen voor parameterbepaling
- 4.3 Bodemopbouw
- 4.4 Schuifsterkte parameters
- Grondgedrag en rol van in situ toestand
- Schuifsterke in CSSM-model
- Keuze gedraineerd of ongedraineerd grondgedrag
- Gedraineerde schuifsterkte
- Cohesie van grond
- Hoek van inwendige wrijving
- Hoek van inwendige wrijving bepalen uit metingen
- Ongedraineerde schuifsterkte
- Normaal geconsolideerde ongedraineerde schuifsterkte ratio S
- Voorbeelden bepalen schuifsterkte ratio S
- Sterktetoename-exponent m
- Grensspanning, POP en OCR
- Grensspanning in het ontwerp
- Toename ongedraineerde schuifsterkte in de tijd
- Stapsgewijs bepalen ongedraineerde schuifsterkteparameters
- Ongedraineerde sterkte uit gebiedspecifieke correlaties met sonderingen
- Ongedraineerde schuifsterkte uit correlaties met sonderingen
- Ruimtelijke variabiliteit van de sondeerweerstand
- Su en POP bepalen uit één sondering
- Su en POP bepalen uit meerdere sonderingen
- Grensspanning, POP en OCR uit schuifsterkteparameters afgeleid uit sonderingen
- Ongedraineerde schuifsterkte van zware zandige siltige klei
- Schuifsterkte in de (initieel) onverzadigde zone
- Piek-schuifsterkte versus grote-rek-schuifsterkte
- Schuifsterkte bij ondiepe glijvlakken en afschuiven bekleding
- 4.5 Doorlatendheid
- 4.6 Vervormingseigenschappen
- 4.7 Overige grondparameters
- 4.8 Karakteristieke schattingen van grondparameters
- 5. Rekenmodellen voor geotechnische instabiliteit
- Rekenmodellen afschuiven
- Methode Bishop
- Methode LiftVan, rekenmodel afschuiven langs diep glijvlak
- Methode Spencer, rekenmodel afschuiven
- Glijvlak zoekroutines
- Rekenen aan afschuiven bij opdrukken achterland
- Rekenmodellen voor afschuiven en/of afdrukken van de bekleding en uitspoelen
- Rekenmodel afdrukken bekleding
- Rekenmodel uitspoelen en afschuiven van zand zonder kleibekleding
- Rekenmodel uitspoelen zand door bekleding
- 6. Oplossingen voor dijkverbetering
- 6.1 Uitvoering
- Uitvoering dijkverbetering
- Veiligheid waterkering tijdens dijkverbetering
- Stabiliteit tijdens de uitvoering dijkverbetering
- Uitvoeringsbegeleiding dijkverbetering
- Kwaliteitscontrole bij uitvoering dijkverbetering
- Koppeling tussen ontwerp en uitvoering van dijkverbetering
- Overhoogte bij uitvoering dijkverbetering
- Aanbrengen en verdichten van grond
- 6.1 Uitvoering
- 7. Beheer
Glijvlak zoekroutines
Omdat glijvlakberekeningen de stabiliteit bepalen van een voorgeschreven glijvlak dat vrijwel zeker afwijkt van het glijvlak dat de laagste stabiliteit kent, zijn er glijvlak zoekroutines ontwikkeld. De betreffende zoekroutines bepalen voor welke glijvlakken de stabiliteit moet worden berekend. Het glijvlak met de laagste stabiliteitsfactor is uiteindelijk het meest kritische glijvlak.
Er zijn verschillende glijvlak-zoekroutines beschikbaar. Voor elk glijvlak-rekenmodel is er een routine die de voorkeur verdient. In D-Stability is bij iedere evenwichtsbeschouwing het best geschikte zoekalgoritme ingebouwd.
Dit artikel behandelt de volgende routines:
• De rekengrid-methode (brute force).
• Differential Evolution Accelerated Particle Swarm Optimization (Bee Swarm).
De rekengrid-methode
De rekengrid-methode, in D-Stability aangeduid als brute force methode, gaat voor het zoeken van het meest kritische glijvlak uit van een vooraf gekozen set glijvlakken waarvoor stuk voor stuk de stabiliteitsfactor wordt berekend. De glijvlakken worden gekarakteriseerd door een set parameters die ieder stapsgewijs worden doorlopen van een minimum waarde tot een maximum waarde.
Voor het rekenmodel Bishop is het glijvlak cirkelvormig. De volgende drie parameters karakteriseren normaliter dat glijvlak:
- De horizontale coördinaat van het rotatiecentrum van het glijcirkel.
- De verticale coördinaat van het rotatiecentrum van het glijcirkel.
- De straal van de glijcirkel of de tangentlijn behorende bij het middelpunt.
Na het evalueren van alle (toegestane) glijcirkels, is de glijcirkel met de laagste gevonden stabiliteitsfactor de meest kritische glijcirkel.
Een nuttige optie bij dit zoekalgoritme kan de volgende zijn: als de laagst gevonden stabiliteitsfactor hoort bij een glijvlak dat hoort bij een grens van het zoekbereik, kan dat zoekbereik telkens met een extra stap worden uitgebreid totdat het meest kritische glijvlak niet meer op één van de grenzen van het zoekbereik is gebaseerd.
Deze optie is uiteraard alleen handig als het zoekbereik niet bewust is ingeperkt om glijvlakken uit te sluiten die uiteindelijk niet tot falen van de kering leiden, zie het artikel Kritsch glijvlak en vervolgmechanismen bij afschuiven langs een diep glijvlak.
Dit algoritme is bruikbaar als het aantal vrijheidsgraden dat in gebruik is om de potentiële glijvlakken te beschrijven, beperkt is. Voor de methode Bishop, met drie vrijheidsgraden, is dit het meest voor de hand liggende zoekalgoritme. Als wordt uitgegaan dat er voor iedere vrijheidsgraad 10 berekeningen moeten worden gemaakt, is voor een Bishop-analyse het berekenen van een stabiliteitsfactor voor 10x10x10 = 1000 opgelegde glijcirkels noodzakelijk. Voor het rekenmodel LiftVan, die vijf vrijheidsgraden kent, is het aantal berekeningen dan niet orde 1.000, maar orde 100.000
Daarom is voor een LiftVan-analyse de hierna behandelde zoekroutine qua rekentijd te verkiezen.
Differential Evolution Accelerated Particle Swarm Optimization
Voor de methode LiftVan zijn de vrijheidsgraden gekarakteriseerd met de volgende vijf parameters:
- De horizontale coördinaat van het rotatiecentrum van de afschuiving in de actieve zone.
- De verticale coördinaat van het rotatiecentrum van de afschuiving in de actieve zone.
- Het niveau van het horizontale deel van het glijvlak in de passieve zone.
- De horizontale coördinaat van het rotatiecentrum van de afschuiving in de passieve zone.
- De verticale coördinaat van het rotatiecentrum van de afschuiving in de passieve zone.
Er zijn nog andere geometrieparameters die het glijvlak beschrijven, maar die zijn afhankelijk van de bovengenoemde:
- De straal van de glijcirkel in de actieve zone: verschil tussen de verticale coördinaat van het rotatiecentrum van de afschuiving in de actieve zone en het niveau van het horizontale deel van het glijvlak.
- De lengte van het horizontale deel van het glijvlak in de passieve zone: het verschil tussen de horizontale coördinaten van het passieve en het actieve rotatiecentrum.
- De straal van de glijcirkel in de passieve zone: verschil tussen de verticale coördinaat van het rotatiecentrum van de afschuiving in de passieve zone en het niveau van het horizontale deel van het glijvlak.
Dit maakt berekenen van alle denkbare combinatie een zeer tijdrovende klus, terwijl stapsgewijs naar een minimale stabiliteitsfactor zoeken de kans oplevert dat er slechts een lokaal minimum wordt gevonden. Die kans is voor de methode LiftVan niet denkbeeldig omdat evaluatie van verschillende berekeningen sets heeft geleerd dat lokale minima met steile gradiënten rond die minima gebruikelijk zijn voor de gevonden stabiliteitsfactor als functie van de beschrijvende parameters.
Dat maakt dat voor de methode LiftVan een op het Differential Evolution Accelerated Particle Swarm Optimization (DPSO) algoritme gebaseerd zoekproces is ontwikkeld. Daarbij wordt steeds een flinke set situaties (Swarm) doorgerekend, dat verkleint de kans om het meest kritische glijvlak te missen. Op grond van de uitkomsten wordt de set situaties bijgesteld (een nieuwe generatie met een bepaalde mate van mutatie) en opnieuw doorgerekend. Evaluatie van deze zoekroutine aan de hand van een tiental dwarsprofielen waar het opdrijfmechanisme een rol speelde, heeft een set standaard stuurparameters opgeleverd. Zo wordt als geoptimaliseerde set omvang 75 stuks en als aantal iteraties (=generaties) 24 aanbevolen. Uit een vergelijking van dit algoritme met andere algoritmen bleek het DPSO-algoritme een nauwkeuriger en stabielere uitkomst op te leveren [Van der Meij, 2019].
Genetisch algoritme
Het genetisch algoritme is gebaseerd op de theorie van Darwin, te weten de Survival of the fittest, oftewel het overleven van de best aan de omgeving aangepaste. Het schema in Figuur 1 toont de stappen die het algoritme doorloopt om tot een optimale oplossing te komen.
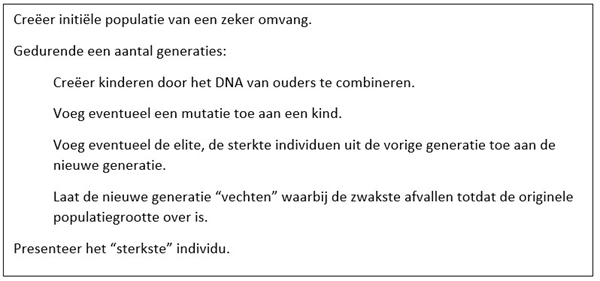
Een glijvlak, een individu, bevat DNA ter codering van zijn eigenschappen. Voor een Bishop glijcirkel is een lijst met drie eigenschappen voldoende, te weten de x Eerste horizontale coördinaat [m]- en y Tweede horizontale coördinaat [m]-coördinaat van het middelpunt van de cirkel, en de straal Rg Straal van het cirkelvormig glijvlak [m] van de cirkel. Kinderen worden gecreëerd door willekeurig de x Eerste horizontale coördinaat [m]-, y Tweede horizontale coördinaat [m]- en Rg Straal van het cirkelvormig glijvlak [m]-waarde van de ouders met elkaar te combineren. Het bepalen van de mate van aanpassing (fit) gebeurt door de stabiliteitsfactor uit te rekenen. Individuen met de hoogste stabiliteitsfactoren vallen af.
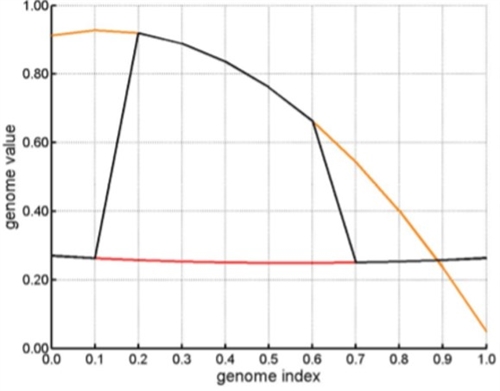
Het individu bij de methode Spencer [van der Meij 2010] bestaat uit een lijst die een lengte heeft gelijk aan het aantal punten langs het glijvlak. Deze lijst bevat waardes tussen de 0 en 1 die aangeven hoe ver het glijvlakpunt bij de ondergrens van het zoekgebied (zie ook Figuur 2 in het artikel Methode Spencer) verwijderd is. Bij een waarde nul ligt het punt van het glijvlak op de ondergrens, bij 0,5 ligt het punt halverwege en bij een waarde 1 ligt het punt op de bovengrens van het zoekgebied. Kinderen worden gecreëerd aan de hand van een “single point-” of “double point cross-over”. Bij een single point cross-over is het begin van één glijvlak (de vader) afkomstig en het einde van een ander glijvlak (de moeder). Double point cross-over is het begin en eind afkomstig van een glijvlak en met het midden van een ander glijvlak. Figuur 2 geeft een dubbel point cross-over grafisch weer. Deze stuurparameters zijn ingesteld in D-Stability (naar [Pasik, 2017]) en niet toegankelijk voor een gebruiker.
Mutaties kunnen worden geïntroduceerd door in een willekeurige punt een sprong naar een willekeurig andere waarde te hanteren, dan wel een geringe verandering (creep) aan te nemen.
Het “vechten” vindt plaats aan de hand van de glijvlakberekening. Het glijvlak met de hoogste veiligheidsfactor is het “zwakst”. Dit glijvlak wijkt namelijk het verste af van het gezochte kritische glijvlak. De zwakste individuen worden uit de populatie verwijderd.
Nadat het sterkste individu gevonden is, doet D-Stability nog een extra optimalisatie stap. Met de gradiënt gebaseerde optimalisatiemethode Levenberg-Marquardt [Marquardt, 1963] wordt het “sterkste” individu verder geoptimaliseerd. Dit betekent in de praktijk dat het gevonden glijvlak glad getrokken wordt, wat resulteert in een betere vorm en een nog iets lagere veiligheidsfactor.
In de software D-Stability is er voor elk van de drie glijvlakmethoden, Bishop, LiftVan en Spencer, een standaard set stuurparameters voorhanden. Die standaard set levert normaliter een snelle en accurate convergentie bij een niet al te groot zoekgebied. Voor iedere methode kan de gebruiker zelf meer grondig zoeken indien de gebruiker verwacht dat de precisie onvoldoende is.
Literatuur
D-Stability op website Deltares.
Pasik, T. en R. van der Meij. Locating critical circular an unconstrained failure surface in slope stability analysis with tailored genetic algorithm. Studia Geotechnica et Mechanica 39(4), 87-98, december 2017.
Van der Meij, R. Handleiding bij methode Spencer-Van der Meij : Macrostabiliteit in DGeoStability. Deltares, rapport 1209607-000-GEO-0004, mei 2014.
Meij, R. van der, en J.P. Kwekkeboom Decreasing Computational Cost of a Slope Stability Analysis by Differential Evolution Accelerated Particle Swarm Optimization. The seventh international conference on structural engineering, mechanics and computation, Cape Town, South Africa, 2019.
Meij, R. van der, en J.B. Sellmeijer A Genetic Algorithm for Solving Slope Stability Problems: from Bishop to a Free Slip Plane. 7th European Conference on Numerical Methods in Geotechnical Engineering (NUMGE), Trondheim. Balkema, Rotterdam, 2010.
Marquardt, Donald W. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. Journal of the Society for Industrial and Applied Mathematics, Volume 11, Issue 2, pages 431–441. SIAM, Philadelphia, 1963.